An arbitrary rotation in three-dimensional space R3 can be described by three Euler rotations by angles α, β, γ about the x^, y^ and z^-axis. Each rotation is thereby represented a rotation matrix R. The sequential rotations are equivalent to a single rotation about an appropriate axis ϕ⃗=ϕϕ^ by an angle ϕ: R(α,β,γ)=Rz(γ)Ry(β)Rx(α)=R(ϕ⃗), with ϕ⃗=ϕ⃗(α,β,γ). This orthogonal transformation rotates the physical system under consideration, while keeping the reference frame of R3, it is therefore an active rotation with respect to the system, expressed as r⃗′=R(α,β,γ)r⃗. What is the transformation of the quantum-mechanical states that corresponds to the three-dimensional spatial rotation of the physical system performed in real space? A transformation that accounts for the vector property of a state vector in the two-dimensional Hilbert space H2 of spin is required.
Let us first take a look at the different transformation behavior of scalars and vectors in three-dimensional space, where a rotation R of a scalar field ϕ is transformed like ϕ′(r⃗′)=ϕ(r⃗) or ϕ′(r⃗)=ϕ(R−1r⃗). Upon transformation it features internal dependence on r⃗ only, since ϕ exists in space independently of any present system it is not transformed externally, it is not directed and therefore does not depend on the choice of the describing system. A vector fielda⃗, on the other hand, very well depends in its representation on the system it is described by, hence it does not only transform internally, but with its components depending on the system, externally too, which is denoted as a⃗′(r⃗′)=Ra⃗(R−1r⃗).
Now back to to the spinor rotations; a state vector in Hilbert space is rotated according to ∣r⃗⟩′=R^∣r⃗⟩, where R^ is defined in such way that it is equal to the vector of its eigenvalue r⃗ transformed by the matrix R in R3, namely ∣r⃗⟩′=∣Rr⃗⟩. Hence, ∣r⃗⟩′=∣r⃗′⟩ and R^∣r⃗⟩=∣Rr⃗⟩. In order to conserve the norm of vectors in R3, R^ must be unitary, which means RR†=R†R=11 and R†=R−1. We start with a wave functionψ′(r⃗′)=ψ(r⃗) and asks for a representation of ψ′ in terms of ψ′(r⃗)=R^ψ(r⃗)=ψ(R−1r⃗). Performing an infinitesimal rotation about to z^-direction (Rz−1(φ)=Rz(−φ),cosφ=1,sinφ=0), we get for the coordinates of three-dimensional space
and consequently the wave function
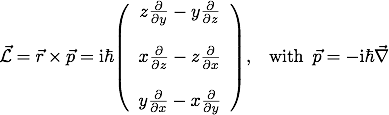
Here the bracket term corresponds to the functional representation of the z−component of the operator of orbital angular momentumLz given by
Therefore ψ′(r⃗) can be written as ψ′(r⃗)=(1−ℏiφLz)ψ(r⃗), or generalized with regard to an arbitrary orientation of a rotation axis φ⃗=φφ^, ψ′(r⃗)=(11−ℏiL⃗⋅φ⃗)ψ(r⃗). This operator represents a differentially small rotation about φ⃗. For a finite rotation, the above operator has to be applied (in the limit) infinitely often, which gives
because of
demonstrating that the operator L⃗ is originator to the described rotation. Although the spin is independent of other degrees of freedom, it is an angular momentum and a vector operator that will likewise transform upon rotation of the system. With L⃗≡S⃗=2ℏσ⃗ we finally obtain U(α⃗)=exp(−i2σ⃗⋅α⃗)=11cos2α−iσ⃗a^sin2α.
Because of exp(−i2σ⃗⋅α⃗)=∑k=0∞k!1(−i2σ⃗⋅α⃗)k=∑k=0∞k!1(2−iα)k(σ⃗⋅α^)k, where we have again used α⃗=αα^, the sum can be split in a part with even and one with odd indices exp(−i2σ⃗⋅α⃗)=∑k=0∞(2k)!1(2−iα)2k(σ⃗⋅α^)2k+∑k=0∞(2k+1)!1(2−iα)2k+1(σ⃗⋅α^)2k+1. Using (σ⃗α^)2=σiαiσjαj=σiσjαiαj=(δij11+iϵijkσk)αiαj=δijαiαj11=α^211=11, which leads to (σ⃗α^)2k=11 and (σ⃗α^)2k+1=(σ⃗α^), we finally get
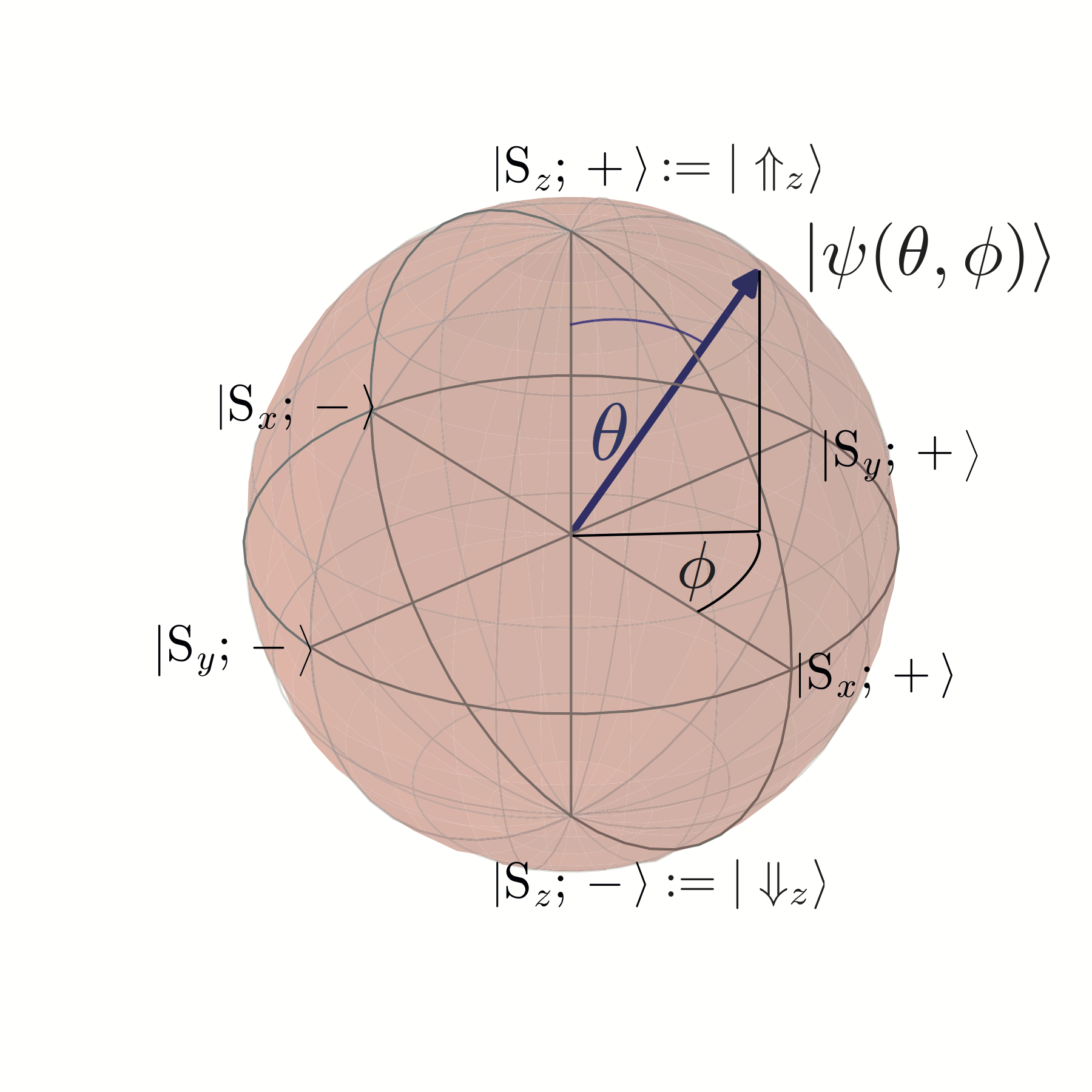
It is instructive to take a look at the effect of the unitary operator U on the spin eigenstate ∣⇑z⟩. We apply the operator U(θ⃗), where θ is the rotation angle about the axes θ^=(sinϕ,cosϕ,0)T onto ∣⇑z⟩, which yields
This is the representation of an arbitrary (pure) spin state, represented by the two parameters θ,ϕ, being the azimuthal and polar angle of the spin’s Bloch sphere representation, which is illustrated below.
R. Buchelt, PhD thesis “Spin Dynamics in Polarized Neutron Interferometry” (2000)